Topic - Graph
GraphDefinition: A graph can be represented by G where G=(V,E). For the graph G, V is a set of vertices and E is a set of edges. Each edge is a tuple (v,w) where w, v \in V.
Vocabulary and Definitions¶
vertex : also anode , is a fundamental part of a graph. It can have a namekey . A vertex may also have additional information calledpayload .Edge : also anarc , connects two vertices, and may be one-way(directed graph) or two-way(undirected graph).- Weight: Edges may be weighted to show that there is a cost (
weight )to go from one vertex to another. E.g. the distance between the two cities. path : a sequence of vertices that are connected by edges. Formally we could define a path as w_1, w_2,...,w_n such that (w_i,w_{i+1}) \in E for all 1 \le i \le n-1. The weighted path length is the sum of the weights of the edges in the path.cycle : a path in a directed graph, which starts and ends at the same vertex. A graph with no cycles is called an acyclic graph. A directed graph with no cycles is called a directed acyclic graph(有向无环图) or a DAG.
Representation¶
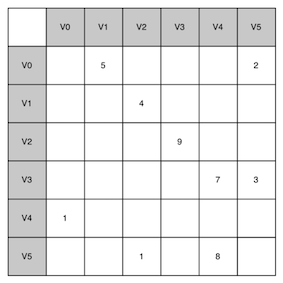
Adjacency Matrix¶
- Each of the rows and columns represent a vertex in the graph.
- The value that is stored in the cell at the intersection of row v and column w indicates if there is an edge from vertex v to vertex w.
- simple, but inefficient if the graph is too large and the matrix is sparse.
- Space Complexity: O(|V|^2), where |V| is the number of vertices.
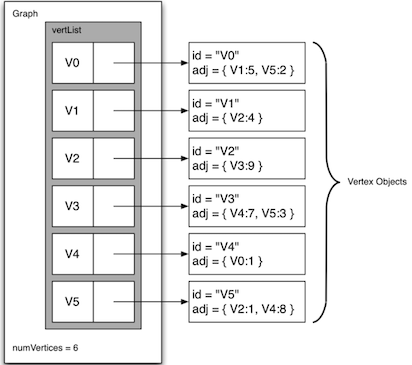
Adjacency List¶
A more space-efficient way to implement a sparsely connected graph is to use an adjacency list. We keep a master list of all the vertices in the
Edge List¶
A list of edges. Edge lists are simple, but if we want to find whether the graph contains a particular edge, we have to search through the edge list. Space Complexity is O(|E|), where |E| is the number of edges.
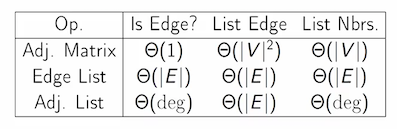
Summary¶
API¶
The graph abstract data type (ADT) is defined as follows:
Graph() : Creates a new, empty graph.addVertex(vert) : Adds an instance ofVertex to the graph.addEdge(fromVert, toVert) : Adds a new, directed edge to the graph that connects two vertices.addEdge(fromVert, toVert, weight) : Adds a new, weighted, directed edge to the graph that connects two vertices.getVertex(vertKey) : Finds the vertex in the graph named vertKey.getVertices() returns the list of all vertices in the graph.in : ReturnsTrue for a statement of the form vertex in graph, if the given vertex is in the graph,False otherwise.
Implementation¶
We will create two classes,
Each
class Vertex:
def __init__(self, key):
self.id = key
self.connectedTo = {}
def addNeighbor(self, nbr, weight=0):
self.connectedTo[nbr] = weight
def __str__(self):
return str(self.id) + ' connectedTo: ' + str([x.id for x in self.connectedTo])
def getConnections(self):
return self.connectedTo.keys()
def getId(self):
return self.id
def getWeight(self, nbr):
return self.connectedTo[nbr]
The
class Graph:
def __init__(self):
self.vertList = {}
self.numVertices = 0
def addVertex(self, key):
self.numVertices = self.numVertices + 1
newVertex = Vertex(key)
self.vertList[key] = newVertex
return newVertex
def getVertex(self, n):
if n in self.vertList:
return self.vertList[n]
else:
return None
def __contains__(self, vertex):
return vertex in self.vertList
def addEdge(self, fromVert, toVert, cost=0):
if fromVert not in self.vertList:
nv = self.addVertex(fromVert)
if toVert not in self.vertList:
nv = self.addVertex(toVert)
self.vertList[toVert].addNeighbor(self.vertList[toVert], cost)
def getVertices(self):
return self.vertList.keys()
def __iter__(self):
return iter(self.vertList.values())
Search¶
深度优先搜索(Depth First Search, DFS)和广度优先搜索(Breath First Search, BFS)是常用的图的搜索算法。
DFS和BFS主要差别是搜索的优先级不同,一个广度优先,一个深度优先。
BFS Implementation¶
Breadth-First Search (BFS)
- explored nodes in "layers"
- can compute shortest paths (FIFO)
- can compute connected components of an undirected graph
- O(E+V) time using a queue
BFS (graph G, start vertex s)
-- mark s as explored
-- let Q = queue, initialized with s
-- while Q is not empty:
-- remove the first node of Q, call it v
-- for each edge (v, w):
-- if w unexplored
-- mark w as explored
-- add w to Q(at the end)
Connected Components via BFS¶
A connected component of an undirected graph is a subgraph in which any two vertices are connected to each other by paths, and which is connected to no additional vertices in the supergraph. [wiki]
To compute all components for undirected graph:
-- initialize all nodes as unexplored
[assume labelled 1 to n]
-- for i = 1 to n
-- if i not yet explored
//discovers precisely i’s connected component
-- BFS(G, i)
def bfs(graph, start):
visited, queue = set(), [start]
while queue:
vertex = queue.pop(0)
if vertex not in visited:
visited.add(vertex)
queue.extend(graph[vertex] - visited)
return visited
Running time is O(|E| + |V|).
DFS Implementation¶
Depth-First Search
- explore aggressively like a maze, backtrack only necessary
- compute topological ordering of a directed acyclic graph
- compute connected components in directed graphs
- O(E+V) time using a stack (LIFO) or via recursion
Recursive Version
DFS(graph G, start vertex s)
-- mark s as explored
-- for every edge (s, v):
-- if v unexplored
-- DFS(G, v)
def dfs(graph, start, visited=None):
if visited is None:
visited = set()
visited.add(start)
for next in graph[start] - visited:
dfs(graph, next, visited)
return visited
Iterative Version
DFS(graph G, start vertex s):
-- let S be a stack, and initialized with s
-- while S is not empty
-- u = S.pop()
-- for each edge (u, v)
-- if v is not yet explored:
-- label v as explored
-- S.push(v)
Topological Sort¶
A topological sort of a directed graph is a linear ordering of its vertices such that for every directed edge uv from vertex u to vertex v, u comes before v in the ordering. [wiki]
Note: G has directed cycle => no topological ordering
-- mark all vertexes unexplored
-- L ← Empty stack that will contain the sorted nodes
-- for each vertex
-- if v not yet explored
-- DFS(G, v)
-- DFS(G, start vertex s)
-- for every edge (s, v)
-- if v not yet explored
-- mark v explored
-- DFS(G, v)
-- add s to L
Reference¶
- Problems Solving with Algorithms and Data Structures, Chapter 7
- Depth-First Search and Breadth-First Search in Python